נגישות
- ניווט מקלדת
- צבעוניות חד-גוונית
- צבעוניות הפוך
- דפוס נגיש
- AAA
- ביטול הנגישות (תצוגה רגילה)

חברת Moog Animatics מציגה רכיב מרובה כניסות/יציאות בעל יכולות שליטה בפרוטוקול CAN bus
דמיינו לעצמכם יכולת שליטה במערכת שלמה בפשטות, לצד יעילות ועלות נמוכה ללא שימוש בבקר פיקוד חיצוני.
מעכשיו החלום הזה הופך למציאות!
חברת Moog Animatics גאין להציג רכיב חדש מרובה כניסות ויציאות בעל יכולות שליטה בפרוטוקול CAN bus
מוצר זה הינו הרחבה של רכיב הכניסות/יציאות הקודם, המאפשר ל- SmartMotor Class 5 לתקשר עם רכיבים שונים בפרוטוקול
תקשורת CiA 301 CANopen, כגון:
• כניסות ויציאותדיגיטליות/אנלוגיות מרוחקות.
• בקרי טמפרטורה.
• חיישני מיקום יחסיים או מוחלטים בתקשורת CAN bus.
• יחידת שסתומים פנאומטיים.
• מדי זווית.
• חיישני עומס ועוד.
שליטה בסיסית מאפשרת העברת מידע של 8, 16 או 32 ביט אשר תומכים בפרוטוקולים SDO & PDO.
הפרופילים הנתמכים כוללים בין היתר פרופילי אינקוד, רכבי כניסות/יציאות ו- DS4xx המאפשרים את היכולות הבאות:
• מיפוי דינאמי של המנועים בתוך פרוטוקול התקשרות, מיפוי של רכיבים נוספים וניהול המערכת.
• שליחת וקבלת מידע דרך המנועים במערכת.
• קריאה וכתיבה של פקודות מערכת (SDO).
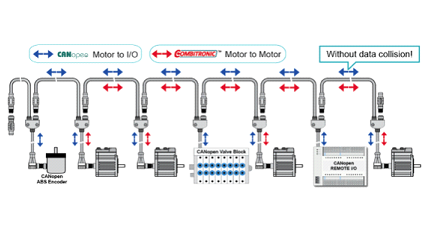
בנוסף, מספר מנועים ורכיבי כניסות/יציאות יכולים להתחבר לאותו פס תקשורת.
על ידי שימוש בתקשורת בין המנועים (Combitronic), ניתן לשלוט במספר צירים בו זמנית ובמספר רכיבי כניסות/יציאות באותו פס תקשורת.
כעת ניתן יהיה לשלוט במערכת שלמה ללא צורך בממשק משתמש נוסף ובבקר פיקוד חיצוני.
יכולת זו ניתנה למימוש על ידי מנועי Class 5 SmartMotor בפרוטוקול התקשורות CANopen Filedbus.
צרו קשר עם אבירי בכדי לדעת כיצד אפשרויות אלו יוכלו לחסוך לך בזמן הפיתוח, יפחיתו את המורכבות המערכת, עליות השכפול ויזרזו את התהליך הייצור עבורך.
יצירת קשר
המפלסים 17, קריית אריה.
ת.ד 3265, פתח תקווה, 4951447
טל: 03-6470471 | פקס: 03-6470472